-
 甘肅質(zhì)量目標(biāo)跟蹤
甘肅質(zhì)量目標(biāo)跟蹤目標(biāo)檢測(cè)與目標(biāo)跟蹤這兩個(gè)任務(wù)有著密切的聯(lián)系。針對(duì)目標(biāo)跟蹤任務(wù),微軟亞洲研究院提出了一種通過目標(biāo)檢測(cè)技術(shù)來解決的新視角,采用簡(jiǎn)潔、統(tǒng)一而高效的“目標(biāo)檢測(cè)+小樣本學(xué)習(xí)”框架,在多個(gè)主流數(shù)據(jù)集上均取得了杰出性能。目標(biāo)跟蹤(Object tracking)與目標(biāo)檢測(cè)(...
2025-06-26 -
 內(nèi)蒙古國(guó)產(chǎn)化目標(biāo)識(shí)別自主可控
內(nèi)蒙古國(guó)產(chǎn)化目標(biāo)識(shí)別自主可控“啟明935A”系列芯片已經(jīng)成功點(diǎn)亮,并完成各項(xiàng)功能性測(cè)試,達(dá)到車規(guī)級(jí)量產(chǎn)標(biāo)準(zhǔn)。啟明935A是行業(yè)首顆基于Chiplet(芯粒/小芯片)異構(gòu)集成范式的自動(dòng)駕駛芯片,但并非單一芯片,而是一個(gè)家族系列。啟明935HUBChiplet可以和不同數(shù)量的大熊星座AICh...
2025-06-26 -
 吉林移動(dòng)目標(biāo)識(shí)別控制軟件
吉林移動(dòng)目標(biāo)識(shí)別控制軟件SpeedDP作為一個(gè)服務(wù)型AI平臺(tái),它能提供從數(shù)據(jù)標(biāo)注、模型訓(xùn)練、測(cè)試驗(yàn)證到RockChip嵌入式硬件平臺(tái)模型部署的可視化AI開發(fā)功能。平臺(tái)所需算法并不是固定的,使用者可以根據(jù)自身實(shí)際應(yīng)用場(chǎng)景進(jìn)行AI算法的定制化開發(fā),例如平臺(tái)經(jīng)過不斷的迭代,目前能夠支持YO...
2025-06-26 -
 江西智慧園區(qū)AI智能方案專家
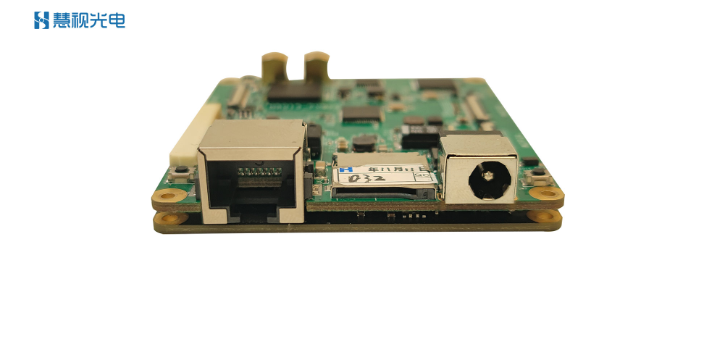
江西智慧園區(qū)AI智能方案專家成都慧視光電技術(shù)有限公司開發(fā)的RK3588系列圖像處理板Viztra-HE030圖像處理板能夠在算法的支持下,對(duì)高速公路上的車輛進(jìn)行檢測(cè)識(shí)別,對(duì)個(gè)別車輛進(jìn)行指定安全跟蹤和檢測(cè),這將有助于有關(guān)部門進(jìn)行測(cè)速和安全駕駛的管理偵查。通過實(shí)時(shí)數(shù)據(jù)的采集分析,還能夠找出高...
2025-06-26 -
 穩(wěn)定目標(biāo)跟蹤銷售廠家
穩(wěn)定目標(biāo)跟蹤銷售廠家由于侵入的目標(biāo)的形狀和顏色等特征是難以固定的,再加上監(jiān)控的場(chǎng)景,即背景往往比較復(fù)雜,只利用一個(gè)單幀圖像就找出移動(dòng)的目標(biāo)是非常困難的。然而,目標(biāo)的運(yùn)動(dòng)導(dǎo)致了其運(yùn)動(dòng)時(shí)間內(nèi),監(jiān)控場(chǎng)景圖像的連續(xù)變化,所以,使用圖像序列分析往往是比較有效的,而且適合于低信噪比的情況。由...
2025-06-26 -
 河南哪些目標(biāo)跟蹤
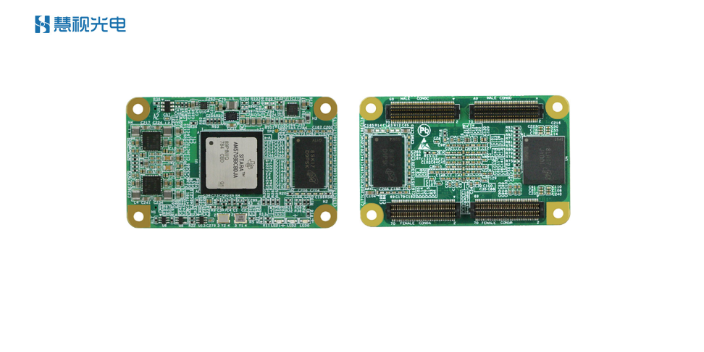
河南哪些目標(biāo)跟蹤無人機(jī)的智能化是推動(dòng)低空經(jīng)濟(jì)發(fā)展的重要引擎,打造智能無人機(jī)需要通信、控制、傳感器等多種技術(shù)的共同作用,其中圖像處理板的目標(biāo)檢測(cè)識(shí)別技術(shù)能夠在智慧巡檢、智慧交通管理、智慧河湖巡查等領(lǐng)域有著積極作用。在成都慧視開發(fā)的多款圖像處理板中,Viztra-LE026以小型...
2025-06-25 -
 多系統(tǒng)適配目標(biāo)跟蹤推薦廠家
多系統(tǒng)適配目標(biāo)跟蹤推薦廠家eVTOL是指電動(dòng)垂直起降飛行器,大力開展eVTOL試點(diǎn),是對(duì)低空經(jīng)濟(jì)的強(qiáng)動(dòng)力注入,而無人機(jī)正是這一領(lǐng)域的關(guān)鍵選擇之一。無人機(jī)在低空經(jīng)濟(jì)中扮演者重要角色,隨著應(yīng)用領(lǐng)域的不斷增多,未來無人機(jī)的數(shù)量將呈式增長(zhǎng),屆時(shí)eVTOL起降中心將聚集眾多各式各樣的無人機(jī),如何...
2025-06-25 -
四川移動(dòng)目標(biāo)跟蹤
YOLO算法的關(guān)鍵技術(shù)在YOLO算法中,有幾個(gè)關(guān)鍵技術(shù)對(duì)其性能起著重要作用。首先是使用卷積神經(jīng)網(wǎng)絡(luò)提取圖像特征,其中引入了一些先進(jìn)的網(wǎng)絡(luò)結(jié)構(gòu),如Darknet。其次是使用AnchorBox來提高目標(biāo)定位的精度。此外,YOLO算法還引入了特征金字塔網(wǎng)絡(luò)和多尺度預(yù)...
2025-06-25 -
 比較好的目標(biāo)跟蹤有什么
比較好的目標(biāo)跟蹤有什么無人機(jī)及其相關(guān)技術(shù)的不斷發(fā)展,已經(jīng)打破了傳統(tǒng)的倉(cāng)儲(chǔ)管理方式,為倉(cāng)儲(chǔ)帶來了智能化的革新。傳統(tǒng)的倉(cāng)儲(chǔ)管理,需要人工進(jìn)行地毯式巡檢,這種方式效率低,費(fèi)時(shí)費(fèi)力。另外,對(duì)于倉(cāng)儲(chǔ)安全的監(jiān)管不能做到時(shí)效性,反應(yīng)速度也具有滯后性。而全新的無人機(jī)巡檢模式,基于先進(jìn)的圖像傳感器、...
2025-06-25 -
高性能目標(biāo)跟蹤多少錢
低空經(jīng)濟(jì)成為當(dāng)下火熱的行業(yè)之一,各行各業(yè)都想利用無人機(jī)為自己服務(wù),但是卻面臨一個(gè)問題,專業(yè)人才嚴(yán)重不足。有關(guān)數(shù)據(jù)顯示,我國(guó)無人機(jī)經(jīng)營(yíng)性企業(yè)已超過1.7萬家,全國(guó)實(shí)名登記的無人機(jī)已超過200萬架。而無人機(jī)人才的缺口卻多達(dá)100萬,這就給低空經(jīng)濟(jì)的快速發(fā)展按下了慢...
2025-06-25 -
 云南視頻設(shè)備
云南視頻設(shè)備十一黃金周即將來臨,各地也將迎來新一輪的人流壓力大考。每到節(jié)假日,各大城市、旅游景點(diǎn)總是人山人海,人多了就會(huì)帶來隱患,因此這個(gè)時(shí)間也是維穩(wěn)部門繁忙的時(shí)候。如何保障游客安穩(wěn)愉快地的過節(jié)至關(guān)重要。當(dāng)下,有關(guān)部門主要使用無人機(jī)進(jìn)行安全維穩(wěn)的輔助設(shè)備,無人機(jī)在城市安防...
2025-06-25 -
網(wǎng)絡(luò)目標(biāo)跟蹤聯(lián)系方式
通常,遮擋可以分為三種情況:目標(biāo)間遮擋、背景遮擋、自遮擋。對(duì)于目標(biāo)之間的相互遮擋,可以選擇根據(jù)目標(biāo)的位置和目標(biāo)特征的先驗(yàn)知識(shí)來處理這一問題。而對(duì)于場(chǎng)景結(jié)構(gòu)的導(dǎo)致的部分遮擋此方法則難以判斷,因?yàn)殡y以辨認(rèn)究竟是目標(biāo)形狀發(fā)生變化還是發(fā)生遮擋。所以,處理遮擋問題的通用...
2025-06-25 -
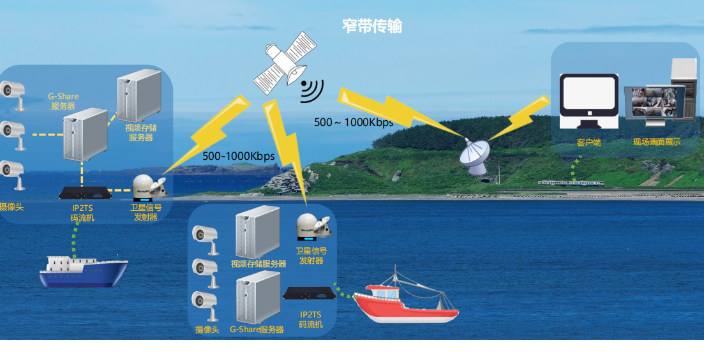
 吉林窄帶多路視頻壓縮與傳輸供應(yīng)商
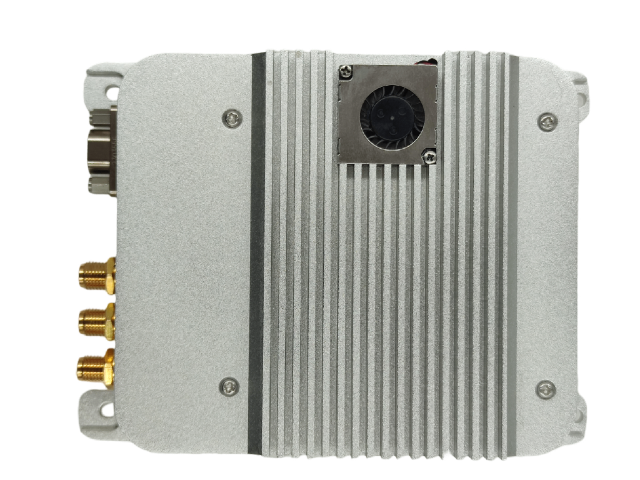
吉林窄帶多路視頻壓縮與傳輸供應(yīng)商在許多區(qū)域,如偏遠(yuǎn)山區(qū)、遠(yuǎn)洋水域,由于離信號(hào)塔離陸地較遠(yuǎn),受到帶寬不足的限制,各種通信方式信號(hào)微弱,不足以支撐多路通信同時(shí)并行,甚至單路通信時(shí)也會(huì)出現(xiàn)延遲高、畫面卡頓、無法連接等情況,十分不便。面對(duì)這樣的困境,成都慧視光電技術(shù)有限公司推出的GS弱網(wǎng)高清視頻壓縮...
2025-06-25 -
 遼寧目標(biāo)跟蹤多少錢
遼寧目標(biāo)跟蹤多少錢目標(biāo)跟蹤(Target Tracking)是近年來計(jì)算機(jī)視覺領(lǐng)域比較活躍的研究方向之一,它包含從目標(biāo)的圖像序列中檢測(cè)、分類、識(shí)別、跟蹤并對(duì)其行為進(jìn)行理解和描述,屬于圖像分析和理解的范疇。從技術(shù)角度而言,目標(biāo)跟蹤的研究?jī)?nèi)容相當(dāng)豐富,主要涉及到模式識(shí)別、圖像處理、...
2025-06-25 -
 云南目標(biāo)跟蹤檢測(cè)
云南目標(biāo)跟蹤檢測(cè)無人機(jī)的迅猛發(fā)展,使得無人機(jī)的反制技術(shù)也水漲船高,常見的有電子干擾、無人機(jī)識(shí)別對(duì)抗等方式。后者采用圖像識(shí)別技術(shù),通過在無人機(jī)攝像頭的基礎(chǔ)上加裝AI高性能圖像處理板,在算法的作用下,就具備無人機(jī)識(shí)別的功能,為無人機(jī)對(duì)抗創(chuàng)造條件。由于無人機(jī)飛行速度極快,因此針對(duì)于...
2025-06-25 -
廣東目標(biāo)跟蹤服務(wù)電話
無人機(jī)及其相關(guān)技術(shù)的不斷發(fā)展,已經(jīng)打破了傳統(tǒng)的倉(cāng)儲(chǔ)管理方式,為倉(cāng)儲(chǔ)帶來了智能化的革新。傳統(tǒng)的倉(cāng)儲(chǔ)管理,需要人工進(jìn)行地毯式巡檢,這種方式效率低,費(fèi)時(shí)費(fèi)力。另外,對(duì)于倉(cāng)儲(chǔ)安全的監(jiān)管不能做到時(shí)效性,反應(yīng)速度也具有滯后性。而全新的無人機(jī)巡檢模式,基于先進(jìn)的圖像傳感器、...
2025-06-24 -
 湖南目標(biāo)檢測(cè)應(yīng)用
湖南目標(biāo)檢測(cè)應(yīng)用成都慧視推出的深度學(xué)習(xí)算法開發(fā)平臺(tái)SpeedDP,它的主要功能就是幫助進(jìn)行算法模型的測(cè)試驗(yàn)證,進(jìn)行快速的針對(duì)大量數(shù)據(jù)的AI自動(dòng)標(biāo)注,然后提升自身算法能力。在無人機(jī)智能炮彈測(cè)試驗(yàn)證中,通過對(duì)原始算法的模型訓(xùn)練,能夠不斷評(píng)估算法的能力,然后對(duì)新的打擊數(shù)據(jù)集目標(biāo)進(jìn)行...
2025-06-24 -
湖南安全目標(biāo)跟蹤
在很長(zhǎng)一段時(shí)間內(nèi),傳統(tǒng)的糧庫(kù)害蟲檢查方法是依靠人工巡檢,用肉眼觀察,逐倉(cāng)篩查的方法,這種方法覆蓋面不足且效率低下,篩查一次將耗費(fèi)工作人員的大量時(shí)間精力。隨著技術(shù)的發(fā)展,AI化的篩查逐步采用,通過算法的AI識(shí)別實(shí)現(xiàn)自動(dòng)化篩查。方法基于高像素高清攝像機(jī),實(shí)時(shí)遠(yuǎn)程監(jiān)...
2025-06-24 -
 江西國(guó)產(chǎn)圖像處理板
江西國(guó)產(chǎn)圖像處理板在如今的作業(yè)中,無人機(jī)路面巡查替代傳統(tǒng)的人工巡查,展現(xiàn)出巨大的效率優(yōu)勢(shì)。像高速施工工地這樣的環(huán)境下,施工方為了保障施工安全,就需要對(duì)施工范圍進(jìn)行嚴(yán)格管控,傳統(tǒng)的人工巡查效率低,受限于地形、時(shí)間等問題,容易出現(xiàn)盲點(diǎn)。相比人工,利用無人機(jī)進(jìn)行AI識(shí)別則可以逐幀圖像...
2025-06-24 -
 四川雙向?qū)χv視頻傳輸工具
四川雙向?qū)χv視頻傳輸工具我國(guó)的海上油氣開發(fā)正處于上升階段,將會(huì)陸陸續(xù)續(xù)出現(xiàn)有大量的鉆井平臺(tái),這些平臺(tái)遠(yuǎn)離大陸,處于弱網(wǎng)甚至無網(wǎng)環(huán)境,因此中海油鉆井平臺(tái)都是通過海底光纜進(jìn)行通信,一方面是鉆井施工的需要,一方面是對(duì)在鉆井平臺(tái)工作的人員進(jìn)行通信需求的保障。但是海底光纜通信的安全性不足,一旦...
2025-06-24 -
福建質(zhì)量目標(biāo)跟蹤
通常,遮擋可以分為三種情況:目標(biāo)間遮擋、背景遮擋、自遮擋。對(duì)于目標(biāo)之間的相互遮擋,可以選擇根據(jù)目標(biāo)的位置和目標(biāo)特征的先驗(yàn)知識(shí)來處理這一問題。而對(duì)于場(chǎng)景結(jié)構(gòu)的導(dǎo)致的部分遮擋此方法則難以判斷,因?yàn)殡y以辨認(rèn)究竟是目標(biāo)形狀發(fā)生變化還是發(fā)生遮擋。所以,處理遮擋問題的通用...
2025-06-24 -
 多系統(tǒng)適配目標(biāo)檢測(cè)參考價(jià)格
多系統(tǒng)適配目標(biāo)檢測(cè)參考價(jià)格城市濕地公園是“城市之肺”,是生態(tài)建設(shè)的重要一環(huán),因此對(duì)于濕地公園的日常巡邏必不可少。但是大面積的濕地公園地形復(fù)雜交錯(cuò),許多區(qū)域依靠傳統(tǒng)的人工巡邏,無法到達(dá)。此外,人工巡邏的效率遠(yuǎn)遠(yuǎn)不夠,無法做到及時(shí)響應(yīng)和精確記錄,久而久之,成本就不斷累計(jì)增加。無人機(jī)的落地應(yīng)...
2025-06-24 -
 浙江目標(biāo)跟蹤功效
浙江目標(biāo)跟蹤功效無人機(jī)在農(nóng)業(yè)領(lǐng)域能夠?qū)崿F(xiàn)高效率的施肥、播種等操作。但是不同的作業(yè)環(huán)境對(duì)于無人機(jī)的工作性能要求不一樣,同樣的方案在平原地區(qū)適用,在高原地區(qū)就不行。因此針對(duì)于特殊作業(yè)環(huán)境需要制定不同的智慧化方案。像青藏高原這樣地貌復(fù)雜、低氣壓、大溫差的特點(diǎn),參與智能化工作的各個(gè)部...
2025-06-24 -
黑龍江附近目標(biāo)跟蹤
檢測(cè)器的輸出通常被用作跟蹤設(shè)備的輸入,跟蹤設(shè)備的輸出被提供給運(yùn)動(dòng)預(yù)測(cè)算法,該算法預(yù)測(cè)物體在接下來的幾秒鐘內(nèi)將移動(dòng)到哪里。然而,在無檢測(cè)跟蹤中,情況并非如此。基于DFT的模型要求必須在首幀中手動(dòng)初始化固定數(shù)量的對(duì)象,然后必須在隨后的幀中對(duì)這些對(duì)象進(jìn)行定位。D...
2025-06-24 -
山西邊海防圖像識(shí)別模塊目標(biāo)檢測(cè)
無人機(jī)的智能化是推動(dòng)低空經(jīng)濟(jì)發(fā)展的重要引擎,打造智能無人機(jī)需要通信、控制、傳感器等多種技術(shù)的共同作用,其中圖像處理板的目標(biāo)檢測(cè)識(shí)別技術(shù)能夠在智慧巡檢、智慧交通管理、智慧河湖巡查等領(lǐng)域有著積極作用。在成都慧視開發(fā)的多款圖像處理板中,Viztra-LE026以小型...
2025-06-24 -
陜西智慧交通AI智能煙霧識(shí)別
成都慧視推出的深度學(xué)習(xí)算法開發(fā)平臺(tái)SpeedDP,它的主要功能就是幫助進(jìn)行算法模型的測(cè)試驗(yàn)證,進(jìn)行快速的針對(duì)大量數(shù)據(jù)的AI自動(dòng)標(biāo)注,然后提升自身算法能力。在無人機(jī)智能炮彈測(cè)試驗(yàn)證中,通過對(duì)原始算法的模型訓(xùn)練,能夠不斷評(píng)估算法的能力,然后對(duì)新的打擊數(shù)據(jù)集目標(biāo)進(jìn)行...
2025-06-24 -
 山西安防監(jiān)控圖像識(shí)別模塊定制方案
山西安防監(jiān)控圖像識(shí)別模塊定制方案夏季,為了消減酷暑的炎熱,下水消暑成了老老少少的選擇,這也就給溺水事故埋下了隱患。以前,人工巡視雖然能夠起到一定作用,但是仍不能避免時(shí)間差帶來的弊端,每當(dāng)發(fā)現(xiàn)后可能就為時(shí)已晚。而利用無人機(jī),則可以開展不間斷、高密度、大范圍的巡視工作,其靈活機(jī)動(dòng)的特點(diǎn)在巡湖巡河...
2025-06-24 -
 電力應(yīng)急目標(biāo)跟蹤哪里買
電力應(yīng)急目標(biāo)跟蹤哪里買視頻自動(dòng)跟蹤系統(tǒng),一般都是用在露天的、較大地域范圍的監(jiān)控系統(tǒng)中,且邊跟蹤邊錄像。在自動(dòng)跟蹤系統(tǒng)的發(fā)展上,jun用上的視頻自動(dòng)跟蹤、毫米波雷達(dá)跟蹤以及激光雷達(dá)跟蹤等是比較成熟的;非jun用領(lǐng)域,存在一些固定畫面、攝像機(jī)從不運(yùn)動(dòng)的的目標(biāo)檢測(cè)與跟蹤系統(tǒng);基于帶紅外線...
2025-06-24 -
信息化圖像處理板檢測(cè)
RK3588作為瑞芯微國(guó)產(chǎn)化旗艦級(jí)芯片,用在目標(biāo)跟蹤領(lǐng)域,通常情況下跟蹤幀率都在50Hz左右,這已經(jīng)足夠滿足大多數(shù)應(yīng)用領(lǐng)域的需求。但在許多特殊領(lǐng)域,如軍備、邊防,高幀頻的視頻輸出能夠在極短的時(shí)間內(nèi)捕捉到更多的畫面,實(shí)現(xiàn)高速動(dòng)態(tài)場(chǎng)景的連續(xù)拍攝。高幀頻的目標(biāo)跟蹤則...
2025-06-24 -
 江西目標(biāo)跟蹤技術(shù)
江西目標(biāo)跟蹤技術(shù)用檢測(cè)器模型去解決跟蹤問題,遇到的比較大問題是訓(xùn)練數(shù)據(jù)不足。普通的檢測(cè)任務(wù)中,因?yàn)闄z測(cè)物體的類別是已知的,可以收集大量數(shù)據(jù)來訓(xùn)練。例如 VOC、COCO 等檢測(cè)數(shù)據(jù)集,都有著上萬張圖片用于訓(xùn)練。而如果我們將跟蹤視為一個(gè)特殊的檢測(cè)任務(wù),檢測(cè)物體的類別是由用戶在首...
2025-06-24