-
 安徽車輛多路視頻拼接系統(tǒng)廠家供應(yīng)
安徽車輛多路視頻拼接系統(tǒng)廠家供應(yīng)(下篇)AI360全景影像集成4G網(wǎng)口輸出并帶有BSD(Blind Spot Detection)預(yù)警功能的應(yīng)用原理,主要基于視頻拼接技術(shù)、4G通信技術(shù)、系統(tǒng)集成與兼容性技術(shù),以及先進(jìn)的圖像處理和智能識別算法。以下是其詳細(xì)的應(yīng)用原理: 五、應(yīng)用原理總...
2025-07-12 -
 天津防疲勞駕駛預(yù)警系統(tǒng)
天津防疲勞駕駛預(yù)警系統(tǒng)(專輯一)自帶算法的疲勞駕駛預(yù)警系統(tǒng)的技術(shù)原理主要基于先進(jìn)的視覺識別技術(shù)和深度學(xué)習(xí)算法。 一、核XIN技術(shù)與流程視覺識別技術(shù):系統(tǒng)通過安裝在車內(nèi)的攝像頭實(shí)時捕捉駕駛員的面部及肢體動作,如眼睛閉合、眨眼頻率、打哈欠、頭部姿態(tài)等。攝像頭捕捉到的圖像會被...
2025-07-12 -
 江蘇掛車多路視頻拼接系統(tǒng)方案商
江蘇掛車多路視頻拼接系統(tǒng)方案商(中篇)AI360全景影像集成熱成像及疲勞駕駛預(yù)警,并實(shí)現(xiàn)多路視頻同顯的技術(shù)原理,主要涉及多個方面的技術(shù)集成與創(chuàng)新。以下是對該技術(shù)原理的詳細(xì)闡述: 在AI360全景影像系統(tǒng)中集成熱成像功能,可以實(shí)現(xiàn)對車輛周圍環(huán)境的溫度監(jiān)控,進(jìn)一步提高駕駛安全性。其技...
2025-07-12 -
 湖南物聯(lián)網(wǎng)多路視頻拼接系統(tǒng)開發(fā)商
湖南物聯(lián)網(wǎng)多路視頻拼接系統(tǒng)開發(fā)商(下篇)4G 360全景環(huán)視系統(tǒng)集成毫米波雷達(dá)及疲勞駕駛預(yù)警在礦場的應(yīng)用,為礦場作業(yè)帶來了革MING性的安全提升。以下是對這一集成系統(tǒng)在礦場應(yīng)用的具體分析: 四、綜合應(yīng)用優(yōu)勢將4G360全景環(huán)視系統(tǒng)、毫米波雷達(dá)及疲勞駕駛預(yù)警系統(tǒng)綜合應(yīng)用在礦場中,可以...
2025-07-11 -
 福建物聯(lián)網(wǎng)多路視頻拼接系統(tǒng)生產(chǎn)廠家
福建物聯(lián)網(wǎng)多路視頻拼接系統(tǒng)生產(chǎn)廠家(下篇)4G網(wǎng)口輸出8路AI360全景影像系統(tǒng)實(shí)現(xiàn)多路視頻同顯的技術(shù)原理,主要基于視頻拼接技術(shù)、4G通信技術(shù)、系統(tǒng)集成與兼容性技術(shù),以及先進(jìn)的圖像處理與傳輸技術(shù)。以下是對該技術(shù)原理的詳細(xì)闡述: 四、多路視頻同顯技術(shù)視頻流管理:系統(tǒng)對來自8個攝像頭的視...
2025-07-11 -
 正面吊360全景環(huán)視系統(tǒng)
正面吊360全景環(huán)視系統(tǒng)360全景透S功能在挖掘機(jī)上的應(yīng)用主要體現(xiàn): 一、提升視野無死角全FW視野:通過在挖掘機(jī)上安裝多個高清攝像頭,360全景影像系統(tǒng)能夠捕捉挖掘機(jī)周圍的全FW圖像,并通過全透明視覺功能實(shí)時拼接成一個完整的全景視圖。駕駛員能夠清晰地看到挖掘機(jī)周圍的每一個角...
2025-07-11 -
 天津車輛多路視頻拼接系統(tǒng)廠家供應(yīng)
天津車輛多路視頻拼接系統(tǒng)廠家供應(yīng)(中篇)AI360全景影像4路拼接集成BSD(盲點(diǎn)監(jiān)測系統(tǒng))、雷達(dá)、疲勞駕駛預(yù)警及熱成像,并實(shí)現(xiàn)8路視頻同顯的技術(shù)原理,涉及多個方面的技術(shù)集成和融合。以下是對其技術(shù)原理的詳細(xì)闡述: 三、雷達(dá)技術(shù)雷達(dá)探測:雷達(dá)技術(shù)通過發(fā)射電磁波并接收其反射回來的信號來...
2025-07-11 -
 黑龍江工礦車多路視頻拼接系統(tǒng)方案商
黑龍江工礦車多路視頻拼接系統(tǒng)方案商(篇四)AI360全景影像集成4G網(wǎng)口輸出和BSD盲區(qū)預(yù)警系統(tǒng)實(shí)現(xiàn)8路視頻實(shí)時同顯的技術(shù)原理,主要涉及視頻拼接技術(shù)、4G通信技術(shù)、BSD盲區(qū)監(jiān)測技術(shù),以及系統(tǒng)集成與兼容性技術(shù)。以下是對這些技術(shù)原理的詳細(xì)解析: 五、8路視頻實(shí)時同顯的實(shí)現(xiàn)視頻流處理與同...
2025-07-11 -
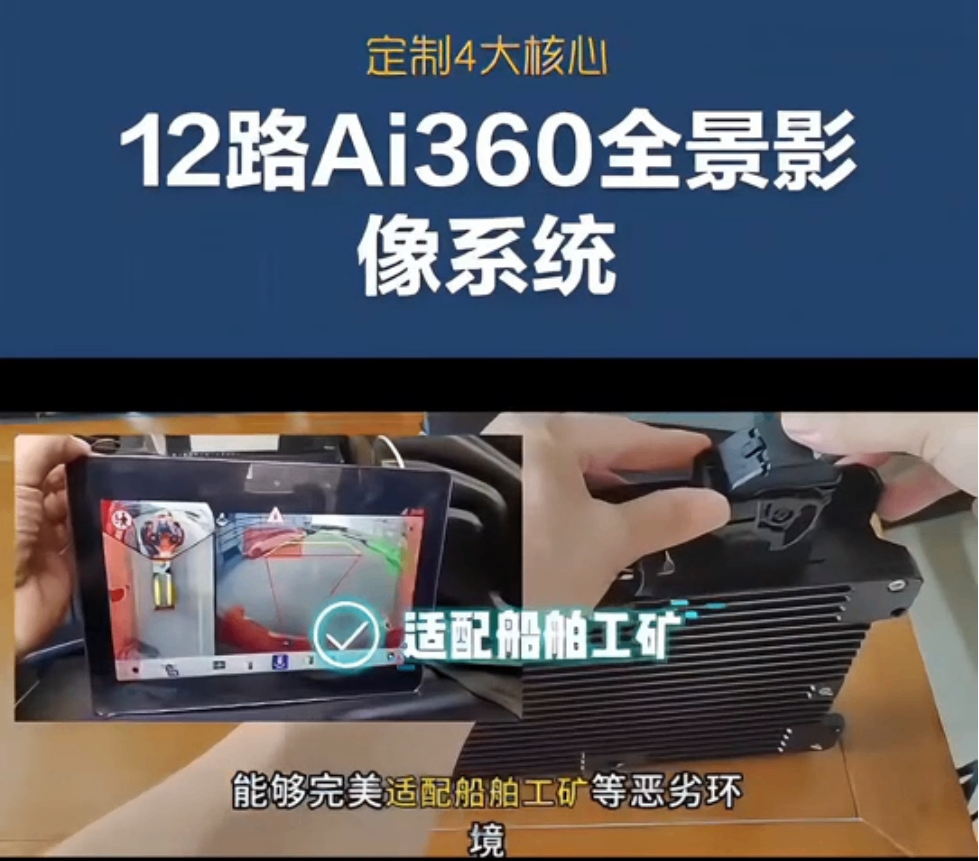 12路AI360全景影像系統(tǒng)|AI360全景影像系統(tǒng)|AI360環(huán)視高清影像系統(tǒng)
12路AI360全景影像系統(tǒng)|AI360全景影像系統(tǒng)|AI360環(huán)視高清影像系統(tǒng)車侶12路AI360全景影像系統(tǒng)的4個核X硬件剖析: 總體國產(chǎn)化器件率超過95%,采用特殊工藝設(shè)計(jì)與處理,適配船舶、工礦等環(huán)境惡劣的場景應(yīng)用。 1:RK3588主控,采用金屬外殼設(shè)計(jì),目前防水等級為IP65,還經(jīng)過防鹽霧等特殊工藝處理。 ...
2025-07-11 -
 廣東礦車司機(jī)行為檢測預(yù)警系統(tǒng)定制
廣東礦車司機(jī)行為檢測預(yù)警系統(tǒng)定制(上篇)自帶算法的疲勞駕駛預(yù)警系統(tǒng)是一種集成了先進(jìn)技術(shù)的安全輔助系統(tǒng),其獨(dú)特的圖像識別系統(tǒng)在避免外界光源干擾、確保預(yù)警功能全天候巡航監(jiān)測方面發(fā)揮著關(guān)鍵作用。以下是對該系統(tǒng)及其圖像識別技術(shù)的詳細(xì)介紹: 一、系統(tǒng)概述疲勞駕駛預(yù)警系統(tǒng)(Driver Fat...
2025-07-10 -
 叉車360全景影像系統(tǒng)銷售
叉車360全景影像系統(tǒng)銷售(上篇)紅外熱像儀在車載主動安全預(yù)警系統(tǒng)中的應(yīng)用,主要得益于其能夠探測并可視化目標(biāo)物體的紅外輻射,這一特性使得紅外熱像儀在多種駕駛環(huán)境中都能發(fā)揮重要作用。以下是對其應(yīng)用的詳細(xì)分析: 一、紅外熱像儀的工作原理紅外熱像儀利用紅外輻射照像原理,研究物體表面...
2025-07-09 -
 叉車360全景影像設(shè)備公司
叉車360全景影像設(shè)備公司車侶360全景影像系統(tǒng)與BSD(BlindSpotDetection)盲區(qū)預(yù)警系統(tǒng)融合使用可以帶來以下幾個方面的使用價(jià)值:1提高盲區(qū)監(jiān)測能力:360全景影像系統(tǒng)可以提供的視覺信息,但在某些情況下,仍然可能存在無法覆蓋的盲區(qū)區(qū)域,例如車身后方。而BS...
2025-07-09 -
 龍門架360全景環(huán)視設(shè)備定制
龍門架360全景環(huán)視設(shè)備定制車侶360全景影像系統(tǒng)與CMS(CollisionMitigationSystem)智能電子后視鏡融合使用可以帶來以下幾個方面的使用價(jià)值:提供全景視野和后方監(jiān)測:360全景影像系統(tǒng)可以提供的視覺信息,幫助駕駛員獲得更廣闊的視野。而CMS智能電子后視...
2025-07-09 -
 上海多路視頻拼接系統(tǒng)公司
上海多路視頻拼接系統(tǒng)公司(中篇)關(guān)于AI360全景影像系統(tǒng)6路拼接2路監(jiān)控視頻實(shí)時上傳智慧云平臺管理的介紹,可以從以下幾個方面進(jìn)行闡述: 三、系統(tǒng)功能360度全景監(jiān)控:系統(tǒng)通過6路攝像頭捕捉車輛或設(shè)備周圍的影像,并實(shí)時拼接成全景畫面。操作者可以通過觸控屏幕輕松選擇不同的視角...
2025-07-09 -
 廣東360全景多路視頻拼接系統(tǒng)廠家供應(yīng)
廣東360全景多路視頻拼接系統(tǒng)廠家供應(yīng)(上篇)主動安全預(yù)警系統(tǒng)在解決超長掛車的視覺盲區(qū)問題時,可以采取多種技術(shù)手段和策略,以下是一些具體的解決方案: 一、攝像頭與360°全景影像系統(tǒng)安裝多個高清攝像頭:在掛車的車頭、車尾以及兩側(cè)后視鏡下方等關(guān)鍵位置安裝高清攝像頭。攝像頭應(yīng)具有高清晰度、低...
2025-07-09 -
 多路360全景影像生產(chǎn)廠家
多路360全景影像生產(chǎn)廠家(中篇)紅外熱像儀在車載主動安全預(yù)警系統(tǒng)中的應(yīng)用,主要得益于其能夠探測并可視化目標(biāo)物體的紅外輻射,這一特性使得紅外熱像儀在多種駕駛環(huán)境中都能發(fā)揮重要作用。以下是對其應(yīng)用的詳細(xì)分析: 三、具體應(yīng)用案例夜間行駛安全:在夜間行駛中,紅外熱像儀能夠探測到車道...
2025-07-09 -
 3D360全景影像系統(tǒng)哪個牌子好
3D360全景影像系統(tǒng)哪個牌子好汽車360全景技術(shù)介紹:360度全景獨(dú)有的虛擬PTZ技術(shù),使得可以在回放圖像時,體驗(yàn)Zoom In/Out以及旋轉(zhuǎn)等操作,可完全取代傳統(tǒng)高速球機(jī)中電機(jī)驅(qū)動的云臺控制系統(tǒng)。有了虛擬PTZ的技術(shù)基礎(chǔ),一方面實(shí)現(xiàn)虛擬現(xiàn)實(shí)將更為容易;另一方面,將減少機(jī)械電機(jī)部件,更大...
2025-07-09 -
 公交車多路360全景影像采購
公交車多路360全景影像采購汽車360度全景影像真的好用嗎?汽車360度全景影像好用。汽車都有A/B/C柱盲區(qū),車頭/車尾盲區(qū)、后視鏡盲區(qū),這些盲區(qū)會導(dǎo)致你看不到障礙物,導(dǎo)致刮蹭的發(fā)生。360度全景影像就消除了盲區(qū)看不見的可能,保證行車以及倒車時的安全。有些全景攝像頭還有記錄保存的功能,...
2025-07-09 -
 廣東360盲區(qū)偵測系統(tǒng)安裝
廣東360盲區(qū)偵測系統(tǒng)安裝全景圖像的優(yōu)點(diǎn):清理死角,普通汽車有A/B/C柱子盲區(qū)、前/后盲區(qū)和后視鏡盲區(qū)。這些盲點(diǎn)可能是看不到障礙物而被撓的原因。360度全景影像消除了看不見盲點(diǎn)的可能性,確保了行駛和倒車時的安全。記錄情況,部分全景照相機(jī)還具有記錄保存功能,可以在停車和行駛時保存周圍的...
2025-07-09 -
 安徽物聯(lián)網(wǎng)多路視頻拼接系統(tǒng)開發(fā)商
安徽物聯(lián)網(wǎng)多路視頻拼接系統(tǒng)開發(fā)商(中篇)AI360全景影像集成疲勞駕駛預(yù)警及熱成像系統(tǒng)實(shí)現(xiàn)多路視頻同顯的技術(shù)原理,主要基于先進(jìn)的圖像處理、人工智能算法以及多路視頻傳輸與顯示技術(shù)。以下是對該技術(shù)原理的詳細(xì)解析: 一旦檢測到疲勞跡象,系統(tǒng)會立即發(fā)出預(yù)警,提醒駕駛員注意休息。智能分析與預(yù)...
2025-07-09 -
 物流車多路360全景影像哪個牌子好
物流車多路360全景影像哪個牌子好車侶4G360全景影像系統(tǒng)具備4G通信功能的意義如下:實(shí)時數(shù)據(jù)傳輸:4G通信功能可以實(shí)現(xiàn)高速、穩(wěn)定的數(shù)據(jù)傳輸,使得360全景影像系統(tǒng)能夠?qū)崟r傳輸全景影像數(shù)據(jù)。這可以幫助用戶在遠(yuǎn)程位置實(shí)時監(jiān)控和觀察拍攝的場景,提供及時的圖像信息和情況反饋.遠(yuǎn)程控制和...
2025-07-09 -
 江蘇大車司機(jī)行為檢測預(yù)警系統(tǒng)
江蘇大車司機(jī)行為檢測預(yù)警系統(tǒng)(下篇)自帶算法的疲勞駕駛預(yù)警系統(tǒng)是一種先進(jìn)的汽車安全系統(tǒng),它通過算法監(jiān)測駕駛員的疲勞狀態(tài),并在必要時發(fā)出警報(bào)。關(guān)于該系統(tǒng)的駕駛員ID身份識別及存儲功能,以下是對其的詳細(xì)解析: 疲勞駕駛記錄:系統(tǒng)還會記錄駕駛員的疲勞駕駛情況,包括疲勞駕駛的時間、時長...
2025-07-09 -
中國澳門商用車多路視頻拼接系統(tǒng)方案商
(上篇)關(guān)于6路AI360全景集成疲勞駕駛預(yù)警及遠(yuǎn)紅外熱成像的多路視頻應(yīng)用,這代BIAO了一種先進(jìn)的車載監(jiān)控系統(tǒng)的發(fā)展趨勢,它融合多種高科技手段,旨在提升駕駛安全性、優(yōu)化駕駛體驗(yàn)。以下是對該應(yīng)用的詳細(xì)分析: 一、6路AI360全景影像系統(tǒng)概述:6路A...
2025-07-09 -
車外360全景影像系統(tǒng)定制
叉車安全防撞系統(tǒng)中幾個關(guān)鍵方面的應(yīng)用: 一、提升視野范圍,處理盲區(qū)叉車在物流、倉儲等行業(yè)中廣泛應(yīng)用,但由于其車身結(jié)構(gòu)和駕駛室位置等因素,駕駛員在操作過程中容易形成盲區(qū),尤其是車身兩側(cè)和后方。360全景影像系統(tǒng)通過安裝在叉車周圍的多個超廣角攝像頭(通常...
2025-07-08 -
 甘肅360全景多路視頻拼接系統(tǒng)方案商
甘肅360全景多路視頻拼接系統(tǒng)方案商(上篇)主動安全預(yù)警系統(tǒng)中的6路視頻拼接技術(shù),其難度主要體現(xiàn)在以下幾個方面: 一、技術(shù)實(shí)現(xiàn)難度畸變矯正:由于制造、安裝、工藝等原因,攝像頭鏡頭存在各種畸變,如內(nèi)部畸變和外部畸變。這些畸變會影響視頻拼接的精度,因此在進(jìn)行視頻拼接前,需要對每個攝像頭的視...
2025-07-08 -
 新疆4G通信司機(jī)行為檢測預(yù)警系統(tǒng)
新疆4G通信司機(jī)行為檢測預(yù)警系統(tǒng)(下篇)車載自帶算法的疲勞駕駛預(yù)警集成MDVR實(shí)現(xiàn)云臺管理的原理 -視頻壓縮與存儲:MDVR采用高效的視頻壓縮算法,確保視頻數(shù)據(jù)存儲和傳輸?shù)男省?多模態(tài)融合:結(jié)合圖像和傳感器數(shù)據(jù),提高疲勞檢測的準(zhǔn)確性。 4.工作流程1.數(shù)據(jù)采集:攝像頭和傳感...
2025-07-08 -
 安徽起重機(jī)多路視頻拼接系統(tǒng)開發(fā)商
安徽起重機(jī)多路視頻拼接系統(tǒng)開發(fā)商(上篇)4G 360全景環(huán)視系統(tǒng)集成毫米波雷達(dá)及疲勞駕駛預(yù)警在礦場的應(yīng)用,為礦場作業(yè)帶來了革MING性的安全提升。以下是對這一集成系統(tǒng)在礦場應(yīng)用的具體分析: 一、4G 360全景環(huán)視系統(tǒng)4G 360全景環(huán)視系統(tǒng)通過在礦車前后左右安裝高清廣角攝像頭,采...
2025-07-08 -
 升降機(jī)360全景影像設(shè)備廠家
升降機(jī)360全景影像設(shè)備廠家360度全景泊車影像系統(tǒng)(又名AVM全景式監(jiān)控影像系統(tǒng),360度全景攝像頭、360度全景影像系統(tǒng)、360度全景泊車系統(tǒng)、360度全景可視系統(tǒng)、360度全景倒車環(huán)視系統(tǒng)),通過安裝在車身前后左右的4個超廣角攝像頭同時采集車輛四周的影像,經(jīng)過“實(shí)時圖像畸變還原對接...
2025-07-08 -
壓裂車360全景影像系統(tǒng)品牌
全景圖像的優(yōu)點(diǎn):清理死角,普通汽車有A/B/C柱子盲區(qū)、前/后盲區(qū)和后視鏡盲區(qū)。這些盲點(diǎn)可能是看不到障礙物而被撓的原因。360度全景影像消除了看不見盲點(diǎn)的可能性,確保了行駛和倒車時的安全。記錄情況,部分全景照相機(jī)還具有記錄保存功能,可以在停車和行駛時保存周圍的...
2025-07-08 -
 掛車360全景可視系統(tǒng)定制
掛車360全景可視系統(tǒng)定制(第2篇)車侶AI 360全景影像系統(tǒng)網(wǎng)口輸出、BSD盲區(qū)預(yù)警與4G云臺車輛運(yùn)營管理技術(shù)集成到機(jī)器人身上,可形成一套多功能、智能化的機(jī)器人解決方案,適用于工業(yè)巡檢、特種作業(yè)、物流運(yùn)輸?shù)葓鼍啊R韵聻榫唧w應(yīng)用分析: 遠(yuǎn)程管理:云端平臺可實(shí)時監(jiān)控機(jī)器人狀態(tài)...
2025-07-08